- Distributed data management
-
The core partner data centres that are integrated in NorDataNet are listed in https://www.nordatanet.no/en/node/69. In addition to this NorDataNet harvests information on relevant datasets from a number of other data centres. The data centre responsible for the data presented is usually (but not always) listed in the discovery metadata. In essence NorDataNet is an aggregating service that combines information from a number of existing data centres.
- Citation of data and service
-
If you use data retrieved through this portal, please acknowledge our funding source:
- Research Council of Norway, project number 245967/F50, Norwegian Scientific Data Network.
Always remember to cite data when used!
Citation information for individual datasets is often provided in the metadata. However, not all datasets have this information embedded in the discovery metadata. On a general basis a citation of a dataset include the same components as any other citation:
- author, title,
- year of publication,
- publisher (for data this is often the archive where it is housed),
- edition or version,
- access information (a URL or persistent identifier, e.g. DOI if provided)
All partner repositories of NorDataNet support Digital Object Identifiers (DOI), but not all datasets are minted. Whether or not minted depends often on source of the data (e.g. operational data are often yet not minted). However, all data centres support persistent identifiers according to local systems. The information required to properly cite a dataset is normally provided in the discovery metadata the datasets.
- Brief user guide
-
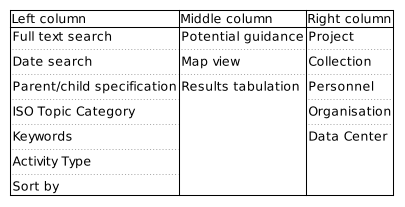
Outline of the data portal search interface. The Data Access Portal has information in 3 columns. An outline of the content in these columns is provided above. When first entering the search interface, all potential datasets are listed. Datasets are indicated in the map and results tabulation elements which are located in the middle column. The order of results can be modified using the "Sort by" option in the left column. On top of this column is normally relevant guidance information to user presented as collapsible elements.
If the user want to refine the search, this can be done by constraining the bounding box search. This is done in the map - the listing of datasets is automatically updated. Date constraints can be added in the left column. For these to take effect, the user has to push the button marked search. In the left column it is also possible to specific text elements to search for in the datasets. Again pushing the button marked "Search" is necessary for these to take action. Complex search patterns can be constructed using logical operators identified in the drop down menu with and phrases embedded in quotation marks. Prefixing a phrase with '-' negates the phrase (i.e. should not occur in the results). Searches are case insensitive.
Other elements indicated in the left and right columns are facet searches, i.e. these are keywords that are found in the datasets and all datasets that contain these specific keywords in the appropriate metadata elements are listed together. Further refinement can be done using full text, date or bounding box constraints. Individuals, organisations and data centres involved in generating or curating the datasets are listed in the facets in the right column. The combination of search fields (including facets) is based on a logical "AND" combination of the fields, i.e. all conditions are fulfilled for the results provided.
Visualize timeseries
Not provided
Show more...
Abstract:
This archive contains three tables: 1) Positional dataset based on GPS tracking data of Antarctic petrels (Thalassoica antarctica) from Svarthamaren breeding colony, Droning Maud Land. Data were collected during three consecutive breeding season (i.e. during the austral summer), from 2011-12 to 2013-14. Positions have been re-discretized (see methods below) at 30-min intervals. | 2) Table S1 from the Supplementary Information. | 3) Table S2 from the Supplementary Information.
Data associated to the following publication: Tarroux, A., Cherel, Y., Fauchald, P., Kato, A., Love, O., Ropert‐Coudert, Y., Spreen, G., Varpe, Ø., Weimerskirch, H., Yoccoz, N., Zahn, S. and Descamps, S. (2020), Foraging tactics in dynamic sea‐ice habitats affect individual state in a long‐ranging seabird. Funct Ecol. Accepted Author Manuscript. doi:10.1111/1365-2435.13632
Quality
Positional dataset - Methods: 1 - GPS coordinates were projected using package proj4 v.1.0-8 (Urbanek 2012) into Polar Stereographic coordinates with 70°S as standard parallel. All successive locations involving perfect stationarity were first removed, and all tracks were then filtered using stepwise recursive routines to exclude locations generating unrealistic movement rates (i.e., speeds > 40m/s; Tarroux et al. 2016). We examined each track twice, before and after filtering, to ensure that all obviously erroneous locations had been removed. The average proportion of relocations removed per track was 0.2% (range = [0; 2.3]). The filtered dataset obtained consisted in n = 132 071 individual GPS locations, representing 1 202 bird-days of tracking. 2 - The programmed time interval between successive GPS locations varied between 5 and 90 min (median = 10 min), and we therefore re-discretized (i.e. resampled at discrete intervals along the path) all tracks at 30-min intervals, thereby assuming linear movements and constant speed between successive relocations (Calenge 2006). Package adehabitatLT v.0.3.16 (Calenge 2006) was used to re-discretize the tracks. 3 - All locations situated 10 km or less from Svarthamaren breeding colony were excluded. The total number of locations obtained was n = 57 418. 4 - We applied hidden Markov models (HMMs; Boyd et al., 2014; Zucchini, MacDonald & Langrock, 2016) to identify the most likely sequence of behavioural states of an individual along its foraging track.See related publication for details.
Positional dataset - Variables description: || “birdID”: unique individual identifier || “track”: track number for each individual, independent of whether tracks were recorded successively or not (most individuals were tracked only once) || “timestamp”: format is %Y-%m-%d %H:%M:%S %z (‘z’ being the time zone) || “lon”: longitude || “lat”: latitude || “hmmState”: Behavioral state predicted by the HMMs. See related publication for details (Appendix 6 and Fig. S1). Levels: 1 (drifting), 2-3 (foraging), 4-5 (transiting).-
Not provided
Show more...
Abstract:
This archive contains the tables and documents (listed below) associated with the project:
“Low energy expenditure at the edge of a seabird’s winter range suggests energy underpins the Abundant Centre Hypothesis”
Authors: Don-Jean Léandri-Breton, Kyle H. Elliott, Arnaud Tarroux, Pierre Legagneux, William Jouanneau, Françoise Amélineau, Frédéric Angelier, Pierre Blévin, Vegard Sandøy Bråthen, Per Fauchald, Geir W. Gabrielsen, Aurélie Goutte, Sabrina Tartu, Børge Moe and Olivier Chastel.
List of files:
- “tracking_immersion_data.csv”, a dataset with location and immersion data
- “daily_energy_expenditure_dataset.csv”, a table with all variables for analyses
- “sst_2008_2019.RData”, an R object with sea surface temperature data
- “detailed_methods.docx”, a document with detailed methodology
- “activity_budget.R”, an R script to estimate the daily activity budget and energy expenditure
- “models_DEE.R”, an R script with all models
1) “tracking_immersion_data.csv” contains all positions and saltwater immersion collected from light-level geolocators and used to estimate the daily activity budget and daily energy expenditure of wintering black-legged kittiwakes (Rissa tridactyla).
The studied population is a long-term monitored colony of individually marked black-legged kittiwakes situated in Kongsfjorden, Svalbard (High Arctic Norway; 78° 54’ N, 12° 12’ E). From 2008 to 2019, we deployed light-level geolocators on adults captured at their nest. Devices were mounted on leg bands and measured ambient light intensity every minute and recorded the maximum light intensity every 5 or 10 min. They also measured saltwater immersion (i.e., conductivity; whether the logger was in contact with the seawater) every 3 or 30 s and stored the number of wet measurements within every 10 min period. The saltwater immersion data were standardized to be comparable among individuals and logger models, such as x st = x / x max, where x max is the maximum value over the 10-min summing period. Overall, we acquired 176 complete tracks from 117 different individuals, covering 11 non-breeding seasons, continuously (fall 2008 to spring 2019).
To infer geographic positions, geolocator light data were processed according to the procedure based on the threshold method to estimate twilight events and developed for the SEATRACK international initiative (Bråthen et al., 2021). Geolocation-based-tracking is inherently prone to create lower accuracy locations in latitudes around equinox periods and cannot be used over periods of continuous daylight (or continuous night) at high latitudes. To fill these gaps in the tracks, and to reduce biases along the trajectories, missing locations were re-estimated by interpolation between known locations using an algorithm specifically developed for SEATRACK (Fauchald et al., 2019) and applied in kittiwakes (Léandri-Breton et al., 2021).
Variable descriptions: “track_id”: unique track identifier; “ring”: unique individual identifier; “timestamp”: date and time (GMT; format %Y-%m-%d %H:%M:%S); “lon”: longitude; “lat”: latitude; “conductivity”: conductivity (saltwater immersion); “std_conductivity”: standardized conductivity; “daytime”: either ‘day’ or ‘night’ associated with the geolocator position estimated at midday and midnight.
2) “daily_energy_expenditure_dataset.csv” contains all variables used for fitting linear mixed-effects models to assess effect of the distance of wintering individuals to the centre of the population’s wintering range on their daily energy expenditure, daily activity budget (time spent flying, foraging and resting), and individual reproductive success.
We monitored nest contents from 2008 to 2021 every two to six days to determine individual breeding success and phenology. We used the success of rearing at least one chick for 10 days after hatching (hereafter ‘breeding success’) as a proxy of the annual reproductive success and expressed as a binary variable (failure = 0, success = 1).
To define the wintering stage, we examined the tracks to identify directional Southeast-Northwest migratory movements before November 30th and after February 1st and determined the wintering period as the last date (wintering area arrival in fall) and first date (wintering area departure in spring) of these movements. The first and last 10 days of the resulting wintering tracks were excluded to ensure that any migratory movements were omitted, as they are associated with high energy expenditure. The centre of the population’s winter range was defined as the centroid of the 95% utilization distribution kernel (UD), estimated over the population’s winter positions (from all tracks, n = 21 510 positions) and projected using a Lambert Azimuthal Equal Area coordinate system (Fig. 1, h=200 km, 50x50 km grid cells). Similarly, the centroid of each individual’s track was calculated from a 95% UD over the individual’s winter position. The distance from the population’s range was defined as the orthodromic distance between the population’s winter centroid and the centroid of each individual’s winter track.
We used the standardized saltwater immersion data (SSI) to build a time-activity budget based on the identification of three behaviours for each 10-min periods: sustained flying (SSI = 0%), resting on water (SSI ≥ 98%) and active foraging (0% < SSI < 98%) which is characterized by a succession of short flights and short swimming or shallow diving bouts (Jodice et al., 2003). To estimate the daily energy expenditure during the wintering stage, we combined the time-activity budget with the population-specific resting metabolic rate (Gabrielsen et al., 1988) and the activity-specific field metabolic rates for the kittiwake flying and foraging behaviours (Jodice et al., 2003).
Variable descriptions: “id”: unique individual identifier; “track_id”: unique track identifier; “year_tracked”: start year and end year of the annual track; “daily.fly.time”: averaged time spent flying daily in winter; “daily.forage.time”: averaged time spent foraging daily in winter; “daily.resting.time”: averaged time spent resting on water daily in winter; “DEE.mean”: averaged daily energy expenditure (kJ/day); “centro.lat”: latitude of the individual’s winter home range centroid; “centro.lon”: longitude of the individual’s winter home range centroid; “dist.centro”: distance (km) between the centroid of the population wintering range and the centroid of the individual wintering home range; “dist.mean”: movement rate (km/day) of the individual in winter; “area”: total area (km2) of the individual’s winter home range in winter; “breeding.success”: proxy of breeding success (0: failure; 1: success); “daylength.mean” averaged day length experienced by the individual during winter; “SST.mean”: averaged sea surface temperature experienced by the individual during winter; “wind.speed.mean”: averaged sea surface wind speed experienced by the individual in winter; “winter_arrival”: arrival date in the wintering area (GMT; format %Y-%m-%d); “winter_departure”: departure date from the wintering area (GMT; format %Y-%m-%d).
3) “sst_2008_2019.RData” contains the Sea surface temperature (SST, daily temporal resolution, product: global-reanalysis-phy-001-031-grepv2-daily, doi.org/10.48670/moi-00024) grid downloaded from the EU Copernicus Marine Service (https://resources.marine.copernicus.eu/products (https://)) at a 0.25° spatial resolution. SST were extracted over the geolocation positions using package “seabiRds” (Patterson 2022), at a daily resolution.
4) “detailed_methods.docx” document containing all detailed methodology on data collection and analysis.
5) “activity_budget.R” is the R script used to estimated the daily activity budget and daily energy expenditure using the geolocator positions, the saltwater immersion data and the sea surface temperature data.
6) “models_DEE.R” is the r script used to fit all models.